Olá a todos,
nesse post mostraremos como podemos utilizar um sensor de infravermelho para identificar objetos que estejam próximos ao sensor para tomar alguma ação. Podemos utilizar o sensor para disparar alarmes ou mesmo para acionar os braques de um veículo controlador por um Arduino, Raspberry PI ou outros microcontroladores/microprocessadores.
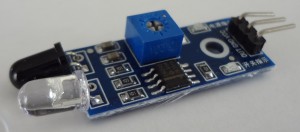
Esse sensor é bem simples de utilizar. Ele é composto de um pino alimentação, um pino que deve ser ligado ao terra e um pino digital. Assim que um objeto ou obstáculo esteja a uma distância inferior a distância estabelecida o pino digital é acionado. A distância miníma de acionamento é configurada através de um potêncimetro que está na placa.
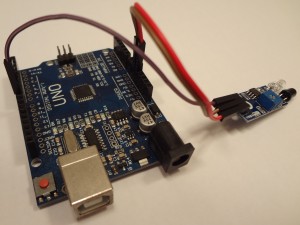
Primeiro faremos as conexões entre o sensor e o Arduino:
- conecte o pino VCC do sensor no pino +5V do Arduino;
- conecte o pino GND do sensor em um pino GND do Arduino;
- Conecte o pino OUT do sensor em um pino digital do Arduino.
No exemplo conectamos o sensor diretamente com o Arduino utilizando cabos macho-femea, mas também é possível colocar o sensor em uma protobard e conectá-lo ao Arduino com cabos do tipo macho-macho.
Passaremos agora para o desenvolvimento do código: primeiro declare uma variável que indicará em qual pino digital o sensor está conectado.
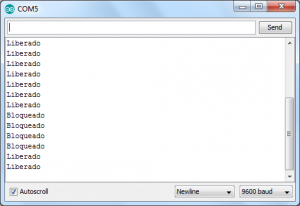
Em seguida na função setup, inicie a porta serial para verificar o funcionamento do sensor e configure o pino para entrada (INPUT).
Por fim, na funçao loop faça a leitura do pino digital onde o sensor está conectado com a função digitalRead. No exemplo verificamos o valor do pino (HIG/LOW) para exibir uma mensagem na porta serial, mas você poderá dispara outras ações.

Obrigado a todos e até o próximo post!
Onde encontrar:
- Sensor de Obstáculo para Arduino ou Raspberry PI
- Arduino R3 Uno
- Dccele Dccduino (clone do Arduino Uno)
- Cabo macho-macho 10cm
- 40 Cabos Jumper Para Protoboard Macho-femea Com 10cm
- 40 Cabos Jumper Para Protoboard Macho-macho 20cm40 Cabos Jumper Macho-femea 20cm De Protoboard P/ Arduino
- Protoboard 400 furos
- Protoboard 830 furos
