Olá a todos,
nesse post demonstraremos como podemos conectar a placa Intel Galileo Gen2 na nossa rede Wifi. Podemos realizar essa conexão por dois modos:
- Utilizando shields WIFI do padrão Arduino
- Por meio de uma placa Wifi mini PCI utilizada em notebooks
O uso de um shield Arduino de Wifi possui a vantagem de utilizarmos o padrão Arduino de conexão, porém limitados o uso da conexão apenas aos sketchs, que são os programas desenvolvidos na linguagem do Arduino. Além disso, toda vez que nossos sketchs iniciarem o objeto de WiFi será iniciada a conexão de rede o que consome algum tempo.
Já o uso da placa de Wifi mini PCI possui a vantagem de podermos utilizá-la em todas as linguagens de programação disponíveis para a Intel Galileo Gen2 e a conexão de rede é estabelecida quando a placa é ligada. Outro beneficio do uso da placa mini PCI no lugar de um shield é a redução de espaço que em alguns casos pode ser crucial.
Para adicionar uma conexão WiFi na Intel Galileo com o uso da placa Mini PCI precisaremos acessar o terminal do Yocto, cujo procedimento está descrito no post anterior. Além dos itens mencionados naquele post precisaremos:
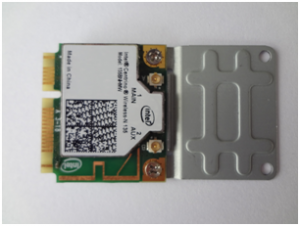
- Placa Intel Centrino Wireless-N 135;
- Adaptador da placa mini PCI;
- Um par de antenas de lap top.
O primeiro passo é montarmos o adaptador na placa mini PCI. Fixe o adaptador na placa com o uso dos parafusos que acompanham o adaptador:
Em seguida conecte as antenas de laptop nos terminais da placa mini PCI. Para encerra a instalação da placa insira os terminais da placa mini PCI no slot mini PCI que está no verso da placa e encaixe os furos do adaptador nos encaixes da placa:

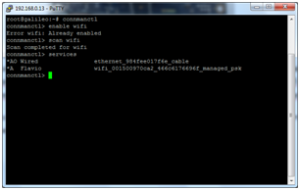
Com a montagem física concluída, ligue a Galileo Gen2 na energia e no roteador com o cabo e inicie uma sessão SSH como mostrado no post anterior. Após iniciada a sessão execute o comando connmanctl. Note que o prompt do terminal foi alterado. Inicie a placa de WiFi com o comando enable wifi e em seguida realize a procura da sua rede com o comando scan wifi.
Para listar as redes identificadas utilize o comando services. Será exibida no terminal uma lista com o nome das redes encontradas e um identificador para cada uma.
Caso a rede que você deseja conectar sua placa possua senha execute o comando agent on. A conexão com a rede é realizada com o comando connect <ID da rede>. Você não precisa digitar todo o ID da rede, somente os primeiros caracteres e em seguida pressione TAB para o Linux completar o texto. Ao entrar com o comando será solicitada a senha.
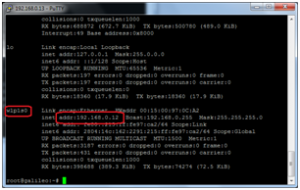
Com a conexão estabelecida digite o comando exit para encerrar o connmanctl. Para confirmar que a conexão WiFi foi estabelecida e obter seu endereço IP execute o comando ifconfig. Você poderá utilizar o endereço IP dessa conexão para futuras conexões com o Putty e também em seus programas:
Onde encontrar:
Obrigado a todos e até o próximo post!