Olá a todos,
nesse post demonstraremos como podemo desenvolver aplicações WEB, utilizando Node .JS com a nossa placa Intel Galileo Gen2. Dessa forma poderemos transformar nossa placa em um servidor WEB que poderá ser acessado na nossa rede local ou mesmo na internet, se atribuirmos um IP de internet à nossa placa.
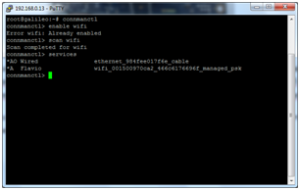
Antes de escrevermos nossos códigos em C++ no Eclipse precisamos colocar nossa placa na rede. As instruções para essa tarefa estão nos posts Conectando a Intel Galileo Gen2 na rede local e Conectando a Intel Galileo Gen2 na rede WiFi.
Com a Intel Galileo na nossa rede o próximo passo é instalar serviço de impressão Bonjour da Apple (apenas para computadores com Windows). Esse serviço é necessário para que o XDK IoT Edition reconheça sua placa na rede. Para instalar esse serviço baixe o instalador no site da Apple.
O passo seguinte é instalar o Intel XDK IoT Edition que é o IDE para escrevermos nossos programas em Noje.JS. Faça o download do instalador no link https://software.intel.com/en-us/articles/install-the-intel-xdk-iot-edition. O instalador deve ser executado com permissão de administrador (clique com o botão direito do mouse sobre o arquivo e selecione a opção Executar como Administrador). Será aberta a tela do instalador do XDK IoT Edition. Siga as instruções do instalador.
Nesse momento teremos o ambiente pronto, precisamos então realizar um pequeno teste para validar a montagem do ambiente.
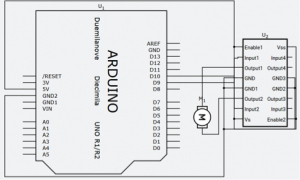
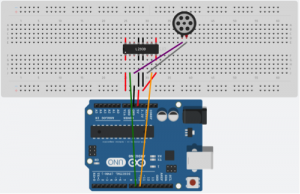
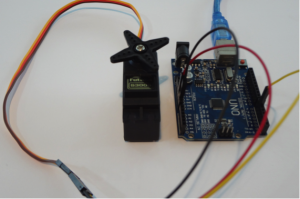
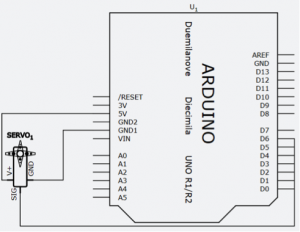
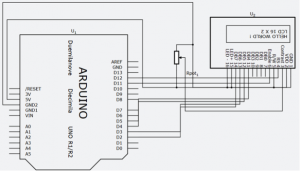
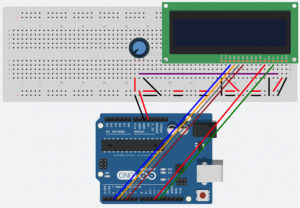
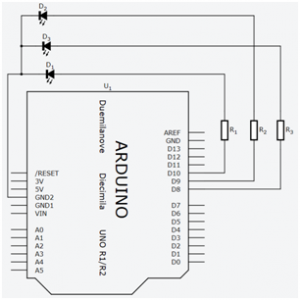
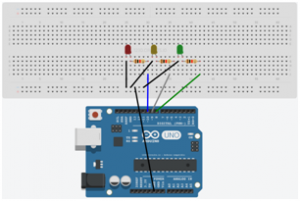
Primeiro monte o circuito conforme descrito no esquema abaixo. Esse circuito é semelhantes ao circuito montado para testarmos o envio de sinais digitais em um post sobre Arduino.
Após a instalação execute o IDE. Na primeira execução deverá aparecer uma mensagem solicitando a liberação no firewall do Windows para o IDE acessar a internet. Clique no botão Allow Access.
Em seguida será aberta a tela inicial do IDE, solicitando o login ou que seja criada uma conta no ambiente da Intel. Após criar sua credencial ou realizar o login deverá aparecer a tela principal do XDK IoT Edition. Selecione a opção Start a New Project para iniciar um novo projeto.
Será aberta a tela para selecionarmos um template de projeto. Selecione o template Simple Web Server e clique no botão Continue. Na tela seguinte preencha o campo Project Name com o nome do projeto.

Depois de criado o projeto abra o arquivo package.json para incluirmos alguns módulos no projeto. No trecho dependencies inclua os módulos express e body-parser como na imagem abaixo. Esses módulos facilitam o desenvolvimento de aplicações web em Noje.JS como veremos a seguir.

O próximo passo é editarmos o arquivo main.js, que possuí o código da nossa aplicação. Ao abrir o arquivo remova todo o seu conteúdo. Em seguida inicie os módulos express, body-parser, util e mraa conforme a imagem abaixo:

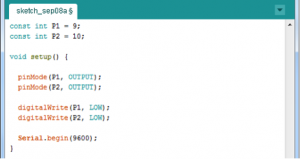
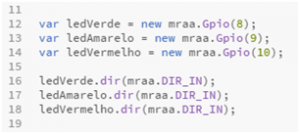
O próximo passo é declaramos e iniciarmos as variáveis que controlarão os valores dos pinos que estão ligados aos leds conforme o trecho abaixo:
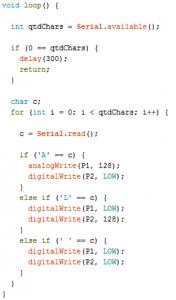
Em seguida declare uma função que controlará os valores dos pinos e escreverá o código HTML para ser exibido no navegador:
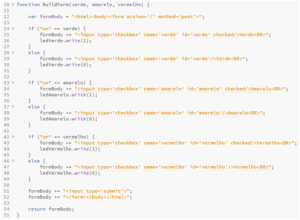
Agora escreva as funções para o webserver processar as requisições do tipo GET e POST e retornar a página HTML. A requisição do tipo GET coloca todos os pinos em estado baixo (LOW) e retorna a página com as caixas de seleção como não selecionadas. As requisições do tipo POST alteram os valores do pino e informam o valor selecionando a caixa quando o estado for HIGH ou não a caixa de seleção quando o valor for LOW:
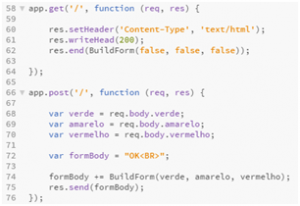
Para encerar o código inicie o webserver com o método listen. Esse método recebe como parâmetro a porta em que o webserver está recebendo as requisições:

Com o programa pronto devemos configurar a conexão com a nossa placa. Na parte inferior do IDE selecione a opção [+] Add Manual Connection no campo IoT Device. Será aberta a janela de configuração de conexão. Informe o endereço IP da placa, mantenha os demais valores e clique no botão Connect.
Com a conexão configurada clique no botão Install/Build (ícone com um martelo) para baixar e instalar os módulos express e body-parser. Em seguida clique no botão Upload (ícone com uma caixa e uma seta, localizado a esquerda do botão Install/Build) para transferir o programa para a placa. O último passo é clicar no botão Run (ícone com um fluxograma e uma seta verde) para iniciar o programa.
Com o programa iniciado abra um navegador de internet e digite o endereço HTTP://<endereço IP>:<porta>, onde o endereço IP é o endereço IP da placa e a porta é a placa do WebServer que foi passada como parâmetro no método listen. Deverá ser exibida no navegador a página da nossa aplicação:
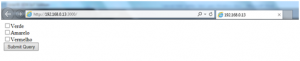
Selecione alguma das caixas de seleção e clique no botão Submit Query. Os valores das caixas serão enviados para a Intel Galileo Gen2 que alterará os valores do pino e mostrará o novo estado dos leds na tela.
Também é possível depurarmos os programas em Node.JS. Para iniciar um programa em modo depuração clique no botão Debug, que possuí o desenho da barata com o triangulo que fica no lado direito do botão Run. Será aberta a tela de debug.
Podemos adicionar breakpoints clicando no número da linha do código. Para iniciar a aplicação clique no botão com o símbolo Play azul localizado na parte superior direita da tela. Aguarde a aplicação iniciar e acesse o mesmo endereço utilizado anteriormente.
Nesse ponto temos uma aplicação web que poderá ser utilizada em nossa rede local ou através da internet caso seja configurado um endereço IP público para a nossa placa.
Onde encontrar:
Obrigado a todos e até o próximo post!